The proposed project focuses on applying machine learning to predict future trajectories, i.e., geographic position, using as input the changes in longitude and latitude, speed, and heading. Trajectories are classified based on inflection points present in the functions representing segments of the trajectories. Since the developed algorithms are intended for real-world data, preprocessing is planned. Trajectories with excessively large time gaps between received values of the required variables are removed. Geometric transformations and timestamp conversion are then applied so that trajectories from different geographic areas, as well as those with different start dates and times, can be processed together.
The planned research includes the following steps:
- Preprocessing input trajectories of jet skis and/or boats (non-stationary time series), especially real-world data where unexpectedly large gaps between records occur. Translation, rotation and/or mirroring will be applied to map all trajectories into the first quadrant of the Cartesian coordinate system. Instead of time and date, the offset in milliseconds from the timestamp of the first point in the trajectory will be used.
- Designing a new method for characterizing (i.e., classifying) trajectory segments based on the inflection points of the function representing a segment of the trajectory.
- Conducting a human-labeling experiment on similar trajectories to compare the proposed algorithm with human judgment of trajectory similarity and class membership.
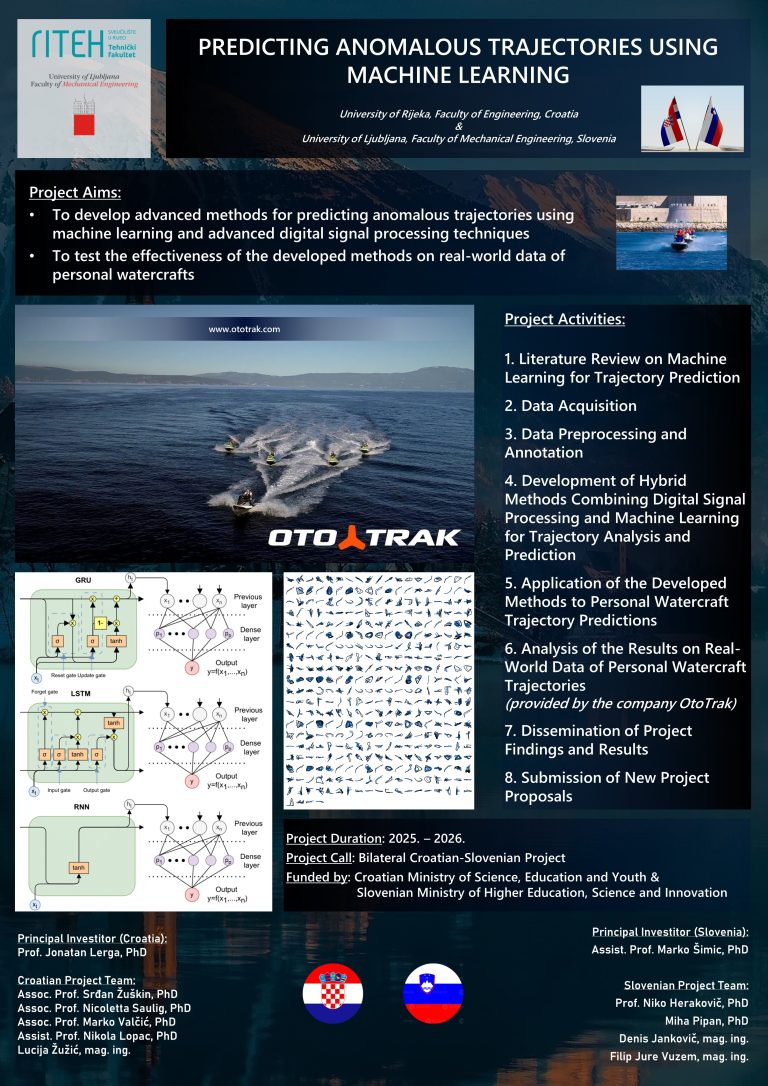
- Segmenting trajectories and analyzing the variables that jointly form a trajectory using machine learning, i.e., recurrent neural network models with GRU and LSTM layers and attention mechanisms.
- Reconstructing trajectories from predictions of time-series values of variables such as longitude and latitude, or heading, speed, and the time interval between consecutive records in a trajectory.
- Validating the proposed machine-learning-based procedures on real-world jet ski and/or boat trajectories.
